







2022年03月20日(日) [
日報 ]
倒立振子を動かしてみよう(No.1)
-
 0
0
-

-

モータ制御を学ぶときに、倒立振子を用いることがあります。最近では、タイヤの付いた倒立振子を用いられることが多いのかな?!ロボットに興味のある生徒さんむけに倒立振子を用意しようと考えました。
一から倒立振子を作っても良いのですが、作るだけで材料費がかかるなるので、手っ取り早くキットになっているものがないか探してみました。本当に、最近は色々な機材が安くなった手に入りやすいですね。
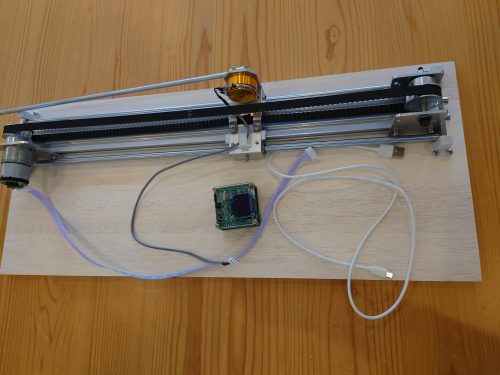
Amazon でまっすぐ倒立振子 自動制御理論に関する研究 線形倒立振子 金属加工用の単一倒立振子のPID制御実験が売っていたので、購入しました。制御ソフトウェアが入ったマイコンもついていましたが、プログラミング教室や電子工作教室などで Micro:bit や Arudino から動作できるようにしたいので、そのマイコンには、しばらく眠っていただくことにしました。
Amazon から購入したのですが、残念ながらセンサやアクチュエータの情報がなかったので、検索をして特性や仕様を調べながら、倒立振子を動かすまでを記事にしたいと思います。最初の1回目は、倒立振子において重要なポテンショメータについて調べました。
導電性プラスチック角変位センサー(WDD35D4-5K)
| Total Resistance Tolerance | 5kΩ±15% |
| Independent linearity tolerance) | 0.1%,0.2%,0.3%,0.5%,1.0% |
| Rated power | 2W(70℃) |
| Temperature coefficient of resistance | ≤ ±400ppm/℃ |
| Insulation resistance | ≥1000MΩ (500V DC) |
| Dielectric strength | 1000V (AC.RMS) 1 min |
| Output smoothness | ≤ ± 0.10% |
| Electrical angle | 345 ° ± 2 ° |
| Mechanical angle | 360 ° (continuous) |
| Starting torque | ≤10×10^-4 N ・≤10×10^-4 N ・ M |
| Operating temperature range | -55℃ ~ + 125℃ |
| Vibration | 150G 2000Hz |
| Shock | 50G 11ms |
| Mechanical life | axis, turn 50,000,000 |
「倒立振子を動かしてみよう(No.2)」へつづく




