







2016年06月24日(金) [
日報 ]
電子工作教室(準備2)
-
 0
0
-

-

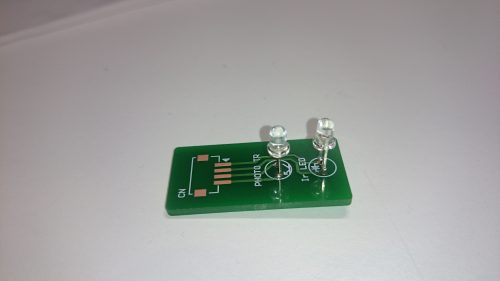
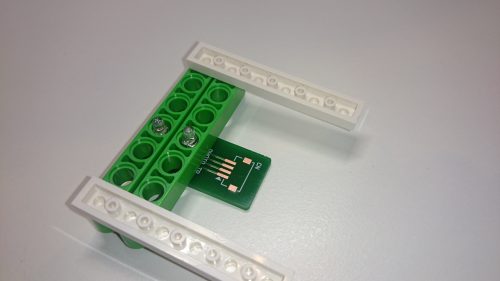
ライントレースロボットでは、反射型センサーを使ってライン(線)を読み取ります。
さっそく、センサー部分の基板が上がってきたので、実装しました(コネクタがまだだけど・・)
コネクタの先は、littleBits に接続します(現在、制作中)。
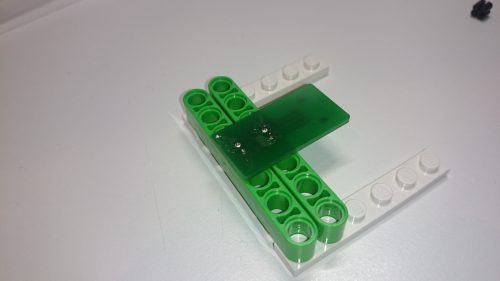
これをレゴブロックにつけたイメージです。

発光部と受光部があります。発光部には、目には見えない光である赤外線を使います。デジカメやスマホのカメラだと、性能によっては、赤く発光している写真が取れなくはないと思います。
発光部
| 品名 | 3mm 赤外線LED |
|---|---|
| 型式 | OSI5FU3A11C |
スペック
| VF | TYP. | 1.35V(IF=100mA) |
|---|---|---|
| IR | MAX | 10μA(VR=5V) |
| ピーク波長 | TYP. | 940nm |
受光部は、発光された赤外線を受けて電気信号に変換するフォトトランジスタを使用しています。
受光部
| 品名 | 3mm フォトトランジスタ |
|---|---|
| 型式 | L-31ROPT1C |
スペック
| ピーク波長 | TYP. | 940nm |
|---|---|---|
| VCE | MAX | 0.4V(Ic=2mA,Ee=0.5mW/cm^2) |
| IC | TYP. | 4mA(VCE=5V,Ee=0.1mW/cm^2) |
| ICEO | MAX | 100nA(VCE=5V,Ee=0.1mW/cm^2) |
| TR/TF | TYP. | 15us/15us(VCE=5V,Ic=1mA,RL=1000Ω) |
このセンサーユニットを2~3つ組み合わせてロボットを作ろうと思います。
もちろん、ちょっと難しい仕組みについても説明していきます!



